Story
No crew, no problem: PML’s autonomous vessel samples the Plymouth Sound for biodiversity data
13 November 2025
PML and partners complete a successful sampling campaign in the Plymouth Sound with uncrewed surface vessel (USV) AutoNaut ‘Pioneer’.
The mission, carried out as part of the EU-funded MARCO-BOLO (MARine COastal BiOdiversity Long-term Observations) project, saw Plymouth Marine Laboratory (PML) and the National Oceanography Centre (NOC) join forces to deploy the autonomous technology.
Autonomous measurements provide a cost-effective opportunity to study the marine environment in detail, whilst also providing a real opportunity to deliver a net-zero oceanographic capability.
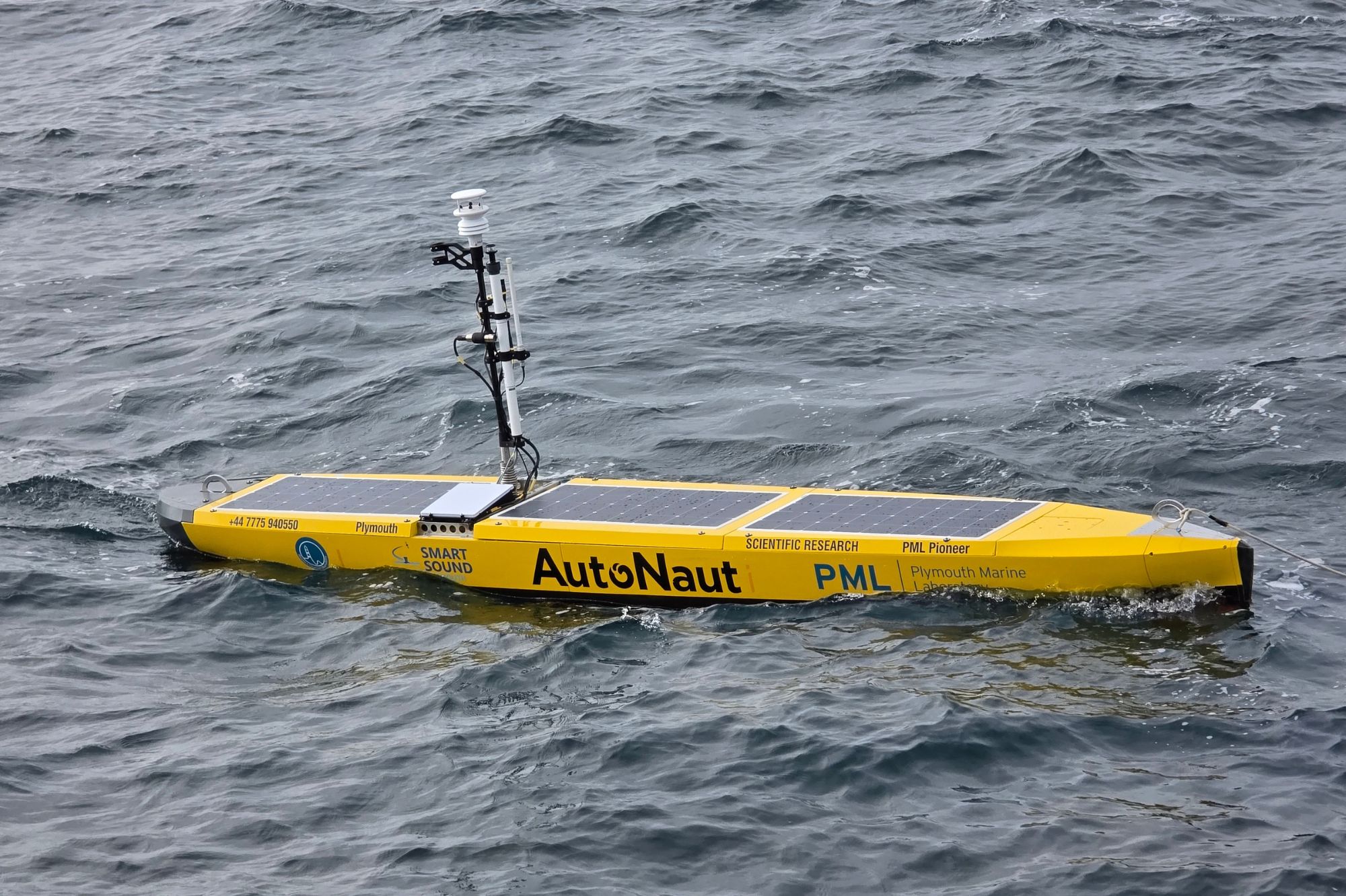
The PML Pioneer is a five-metre AutoNaut uncrewed surface vessel (USV), propelled by wave motion and powered by three hundred-watt solar panels. The integrated scientific payload is the most advanced to be deployed from an AutoNaut, with a range of state-of-the-art sensors that collect data autonomously as it self-navigates the ocean.
During its time spent sampling – 26 hours over 4 days – in the Plymouth Sound, the AutoNaut autonomously collected plankton images with a UVP-6 Plankton Imager, and environmental DNA (eDNA) samples were triggered intelligently by real-time chlorophyll concentrations with a RoSCI eDNA sampler.
It is thought that this is the first time a RoSCI eDNA sampler has ever been deployed on an autonomous surface vessel in Europe.
eDNA refers to any DNA found in the environment, such as skin cells, faecal matter, reproductive material, or even the bodies of smaller animals. Essentially, it’s DNA from any biological material that’s out in the environment.
In marine ecosystems, this DNA can be extracted from water samples. This provides us with a powerful and non-invasive tool for detecting the presence of species and monitoring any changes in biodiversity.
This innovative approach reinforces the potential for autonomous systems to carry out complex biodiversity monitoring tasks efficiently and with minimal human intervention.
The deployment was a milestone in Work Package 4: Mapping Biodiversity with Autonomous Systems of the MARCO-BOLO project, which aims to enable new and advanced technologies for biodiversity observations in coastal and marine regions.
Watch now: the AutoNaut in action

Image: PML’s Professor James Fishwick at Turnchapel Wharf, making final checks on the Pioneer before deployment.
PML’s Professor James Fishwick, project lead at the laboratory, said:
“This mission showcases how autonomous technologies can revolutionise the way we study our marine environments – we can only protect what we understand.”
“By integrating real-time sensing with biodiversity sampling, we can capture vital data on ecosystem changes with greater precision and frequency.”
“This latest PML and NOC mission contributes to MARCO-BOLO’s efforts to validate and refine the use of eDNA for biodiversity assessment, developing tools and technologies that will form part of a sustainable, long-term observation network to support the biodiversity of European waters.”
– Professor James Fishwick: Head of Smart Sound Plymouth and Head of Operations and Technology, Western Channel Observatory

Image: PML’s Prof James Fishwick pictured with Marine Robotics Technologist Ross Sanders making final checks on the Pioneer before deployment, with the PML Explorer following closely behind.

Image: Prof James Fishwick and Ross Sanders with the Pioneer, and onboard the PML Explorer is PML’s Kieran Pechelski and TJ, with NOC’s Susan Evans and Minyong Li on board.
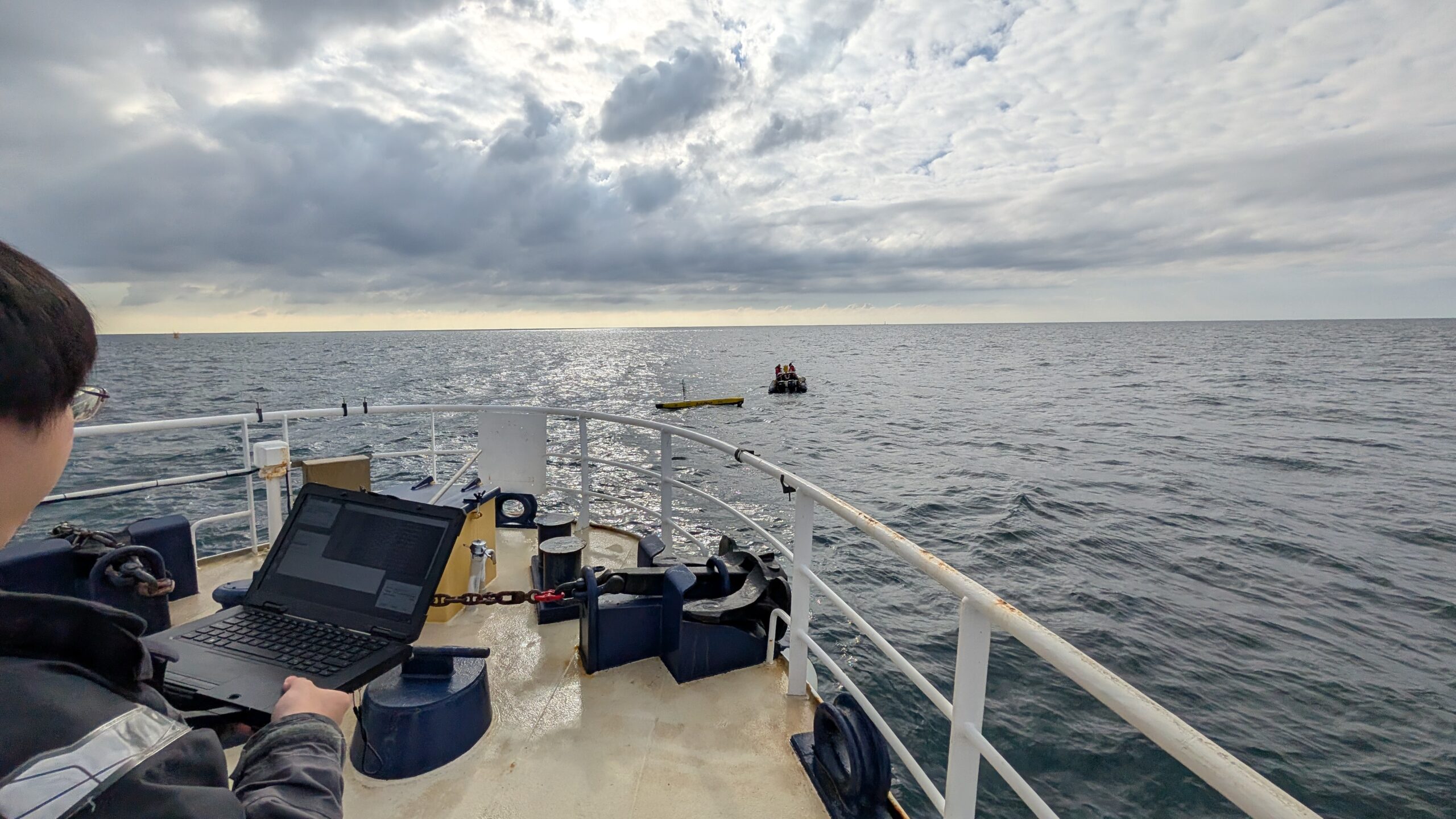

Images above: The AutoNaut deployed at sea, with PML and NOC teams monitoring closely from the PML Explorer RIB and Plymouth Quest Research Vessel
Dr Julie Robidart, who leads Work Package 4 of the MARCO-BOLO project, said:
“This demonstration combines non-invasive, multi-sensor biodiversity observations with the AutoNaut wave-powered vehicle, to provide carbon-neutral, detailed maps of coastal ecosystems. It furthers the state of the art by using networked sensor data streams to decide where and when to sample, without human interaction. Smart technologies like these can decrease power requirements, thus increasing endurance of autonomous systems.”
– Dr Julie Robidart, Head of Ocean Technology and Engineering at National Oceanography Centre

Image: Pioneer’s sampling trip was accompanied by a small pod of dolphins.
Related information
About the MARCO-BOLO project:
Funded through the EU Horizon Europe programme (with support from UK Research and Innovation – UKRI), the €7.3 million, four-year MARCO-BOLO project brings together 28 organisations from research, industry, government and the not-for-profit sectors across Europe.
MARCO-BOLO is led by EMBRC-ERIC (France). The project aims to strengthen marine, coastal, and freshwater biodiversity observation to support better decision-making and help restore ocean health.
